Равновесие тел в физике, теория и онлайн калькуляторы
Равновесие тел
Тело находится в состоянии равновесия, если оно покоится относительно некоторой инерциальной системы отсчета. Изучение условий равновесия тел имеет большое прикладное значение при создании зданий, сооружений, машин и механизмов.
Условия равновесия тел
Первое условие равновесия формулируется, из второго закона Ньютона: тело может находиться в состоянии покоя в некоторой инерциальной системе отсчета только, если равнодействующая всех сил, приложенных к этому телу (материальной точке) равна нулю. И так, первое условие равновесия записывается так:
\[\sum\limits^N_{i=1}{{\overline{F}}_i=0\left(1\right).}\]
Для нахождения тела в состоянии равновесия, необходимо равенство нулю равнодействующей, приложенных к телу сил.
Если тело нельзя считать материальной точкой, то первого условия равновесия будет недостаточно. Рассмотрим стержень на который действуют две равные по модулю, и противоположные по направлению силы (${\overline{F}}_1\ и{\ \overline{F}}_2\ $) рис.1. Данный стержень может вращаться около своей оси, следовательно, он не находится в состоянии равновесия.
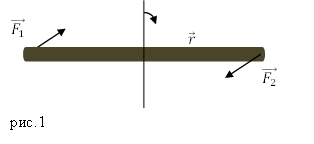
Для формулировки второго условия равновесия используем такую физическую величину, как момент силы ($\overline{M}$):
\[\overline{M}=\overline{r}\times \overline{F\ }\left(2\right),\]
где $\overline{r}\times \overline{F\ }$ - векторное произведение; $\left|\overline{M}\right|=\left|\overline{r}\right|\cdot \left|\overline{F\ }\right|{\sin \widehat{\overline{r},\overline{F\ }}\ }$; $\widehat{\overline{r},\overline{F\ }}$ - угол между вектором силы и радиус-вектором ($\overline{r}$), который проведен от точки вращения к точке приложения силы. Направление вектора момента силы определяют по правилу правого винта (Правый винт вращают от вектора $\overline{r}\ $к вектору $\overline{F\ }$ по кратчайшему расстоянию, при этом поступательное движение винта указывает направление вектора момента силы).
Тело, которое имеет возможность вращаться вокруг неподвижной оси, находится в состоянии равновесия, если сумма моментов всех действующих на него сил относительно любой оси вращения равна нулю:
\[\sum\limits^N_{i=1}{{\overline{M}}_i=0\left(3\right).}\]
Второе условие равновесия называют правилом моментов сил. $\ $\textit{}
Виды равновесия тел
Равновесие можно разделить на: устойчивое, неустойчивое и безразличное.
Равновесие тела называют устойчивым, если при небольших смещениях, действующие на него силы, стремятся вернуть его снова в положение равновесия.
Положение равновесия называют неустойчивым, если при малых смещениях силы, оказывающие воздействие на тело уводят его из положения равновесия еще больше.
Если при небольших смещениях из положения равновесия силы, действующие на тело и их моменты, уравновешиваются, как и прежде, то такое равновесие называют безразличным.
В устойчивом положении равновесия центр тяжести занимает самое низкое положение в сравнении со всеми возможными соседними положениями тела. Устойчивому равновесию соответствует минимум потенциальной энергии тела относительно ее величин в соседних положениях этого же тела. Принцип минимума потенциальной энергии - это один из общих принципов устойчивости равновесия разных систем.
1) Допустим, что тело может вращаться около закрепленной оси. Тело находится в положении равновесия, если ось проходит через центр масс тела (безразличное равновесие). Если центр тяжести тела находится ниже оси вращения, то положение равновесия тела будет устойчивым. Пусть ось вращения расположена ниже центра масс тела, то равновесие будет неустойчивым.
2) В том случае, если тело имеет точку опоры (например, шарик, лежащий на опоре), то тело находится в состоянии устойчивого равновесия, когда равнодействующая всех сил, приложенных к телу, направлена в сторону положения равновесия. Если равнодействующая равна нулю, то положение равновесия безразличное. Положение тела будет не устойчивым равновесием, если равнодействующая сил, приложенных к телу, направлена от положения равновесия.
3) Пусть тело имеет площадь опоры. Тогда его равновесие будет устойчивым, если вертикаль, проводимая через центр масс этого тела, пересечет площадь опоры.
Примеры задач с решением
Пример 1
Задание. Имеются два круглых цилиндра, радиусами R и r. Один из цилиндров лежит на горизонтальной плоскости, другой в состоянии равновесия лежит на нем (рис.1). Оси карандашей перпендикулярны друг другу. При каком соотношении радиусов цилиндров равновесие будет устойчивым? Коэффициент трения цилиндров друг о друга равен $\mu .$
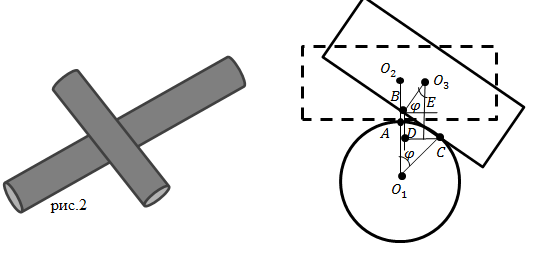
Решение. Верхний цилиндр уравновешен на нижнем цилиндре в горизонтальном положении. При этом центры масс цилиндров $O_1\ и\ O_2$ находятся на одной вертикали. Отклоним верхний цилиндр на угол $\varphi $ от горизонтали. Если бы трение отсутствовало, то он сразу бы соскользнул. Будем считать трение существенным. Тогда при отклонении верхний цилиндр прокатывается без проскальзывания. Точка опоры из положения A переходит в положение C. Та точка, которой верхний цилиндр опирался о нижний переходит в B. В нашем случае (проскальзывания нет), длина дуги AC равна длине отрезка BC:
\[AC=R\varphi =BC\ \left(1.1\right).\]
Центр тяжести верхнего цилиндра переходит в точку $O_3$. Если вертикаль, содержащая точку $O_3,$ проходит левее точки опоры C, то сила тяжести стремится вернуть верхний цилиндр в положение равновесия.
Запишем это условие математически. Проведем вертикаль через точку B. Должно выполняться условие:
\[BE
При этом из рис.1 видим, что:
\[BE=r{\sin \varphi ;;DC=BC{\cos \varphi =R\ \varphi {\cos \varphi \ }\ }\ \left(1.3\right).\ }\]
Следуя условию (1.3) имеем:
\[r{\sin \varphi <\ }R\ \varphi {cos \varphi \ }\to \frac{r}{R}<\frac{\varphi }{tg\ \varphi }\left(1.4\right).\]
Так как $tg\ \varphi >\varphi $ ($0<\varphi <\frac{\pi }{2}$), то сила тяжести будет пытаться вернуть верхний цилиндр в положение равновесия только при:
\[\frac{r}{R}<1.\]
Получается, что положение верхнего цилиндра является устойчивым только тогда, когда его радиус меньше, чем радиус нижнего цилиндра.
Ответ. $r$ < $R$
Пример 2
Задание. На какой максимальный угол можно отклонить верхний цилиндр в первом примере?
Решение. Определим причины ограничивающие угол отклонения. Прежде всего, при больших углах отклонения вертикаль, проводимая через центр тяжести верхнего цилиндра, может пройти правее точки опоры C. Условие (1.4):
\[\frac{r}{R}<\frac{\varphi }{tg\ \varphi }\]
показывает, что при известном отношении радиусов цилиндров ($\frac{r}{R}=\beta $) максимальный угол отклонения ${\varphi }_{m1}$ определен уравнением:
\[tg\ {\varphi }_{m1}=\beta {\varphi }_{m1}\left(2.1\right).\]
Решение этого уравнения можно найти графически.
Кроме того, максимальная величина угла отклонения ограничена трением. Цилиндр не должен соскользнуть. Помня условие равновесия тела на наклонной плоскости, имеем:
\[tg\ {\varphi }_{m2}=\mu \ \left(2.2\right).\]
Получим, что допустимы угол отклонения будет равен меньшему из ${\varphi }_{m1}$, ${\varphi }_{m2}$. Так
как $\beta >1,$ а $\mu <1$, то максимально допустимый угол отклонения почти всегда определяется условием соскальзывания, то есть ${\varphi }_{m2}$.
Читать дальше: сложение колебаний.
Warning: file_put_contents(./students_count.txt): failed to open stream: Permission denied in
/var/www/webmath-q2ws/data/www/webmath.ru/poleznoe/guide_content_banner.php on line
20

Мы помогли уже 4 451 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!