Динамикой называют раздел механики, рассматривающий причины механического движения. Иначе говоря, динамика - это часть механики, которая изучает движение тела, связывая характер перемещения тела с действующими на него силами.
Динамика
Определение
Сила рассматривается как мера взаимодействия тела с окружающими его объектами природы (другими телами, полями).
Законы классической динамики были сформулированы И. Ньютоном и имеют его имя. Основные законы динамики являются обобщением экспериментальных данных. Эти законы следует рассматривать в совокупности, как взаимосвязанные. Экспериментальной проверке стоит подвергать не каждый закон отдельно, а всю систему законов динамики целиком.
Основная задача динамики
Многие задачи науки и техники формулируют следующим образом: имеется тело, известны силы, действующие на тело, следует сформулировать закон движения тела, то есть записать координаты рассматриваемого тела как функции времени.
И так, кратко основную задачу динамики определим так: найти закон движения материальной точки (тела), при известных силах, действующих на нее.
Для решения такой задачи при помощи основного закона динамики (второго закона Ньютона) определяют ускорение движения точки. Затем при помощи кинематических уравнений находят функции скорости и координат зависящих от времени. Такие функции позволяют предсказывать поведение частицы в любой момент времени.
Решение этой задачи в общем виде может быть проблематично. Частное решение любой задачи в классической динамике можно получить при помощи численных методов приближенно, но заданной степенью точности. Точное решение задачи часто удается получить только в самом простом случае, когда проводится расчет движения тела под воздействием постоянной силы. Численные методы применимы для решения любых задач, но они требуют проведения большого числа арифметических операций.
Выделяют и такую задачу динамики, как определение равнодействующей сил, приложенных к телу (материальной точке) при известном характере его движения.
Для определения закона движения материальной точки необходимы:
- Сила, которая действует на материальную точку. Ее можно задать как функцию времени или координат.
- Начальные условия: координаты и скорость точки в некоторый момент времени. Вместо начальной скорости иногда используют начальный импульс.
Основные законы классической динамики
Законы Ньютона составили основу динамики, и по сей день играют в ней исключительную роль.
- Первый закон Ньютона: Если тело не взаимодействует с другими телами или действие других тел скомпенсировано, то скорость тела не изменяется ни по модулю, ни по направлению. Тело перемещается равномерно и прямолинейно.
- Второй закон Ньютона: если тело движется с ускорением, по отношению к инерциальной системе отсчета, то на него действует сила. Сила, вызывает ускорение, величина которого пропорциональна модулю этой силы. Направление ускорения совпадает с направлением, действующей силы. \[\overline{F}=m\overline{a}\left(1\right).\]
Выражение (1)- это второй закон Ньютона в классической динамике.
Этот закон можно записать в иной форме:
\[\overline{F}=\frac{d\left(m\overline{v}\right)}{dt}=\frac{d\left(\overline{p}\right)}{dt}\left(2\right),\]где $\overline{p}=m\overline{v}$ - импульс тела. Тогда второй закон Ньютона формулируют так: сила равна производной от импульса по времени - это наиболее общая формулировка основного закона динамики.
- Третий закон Ньютона: Силы взаимодействия тел равны по величине, направлены вдоль одной прямой и имеют противоположные направления.
То есть, если тело 1 действует на тело 2 с силой ${\overline{F}}_{12}$, то в этот же момент тело 2 действует на тело 1 с силой ${\overline{F}}_{21}$, при этом:
\[{\overline{F}}_{12}=-{\overline{F}}_{21}\left(3\right).\]Релятивистское уравнение движения
Как известно, динамика Ньютона носит ограниченный характер. Ее законы применяют, рассматривая движение макроскопических тел со скоростями много меньшими скорости света. При больших скоростях используют законы и уравнения релятивистской динамики, которая основывается на теории относительности.
Релятивистское уравнение движения материальной точки, являющееся обобщением уравнения движения Ньютона, записывают в виде:
\[\overline{F}=\frac{d}{dt}\left(\frac{m_0\overline{v}}{\sqrt{1-\frac{v^2}{c^2}}}\right)\left(4\right),\]где $m_0$ - масса покоя частицы; $v$ - скорость движения частицы; $c$ - скорость света в вакууме. Уравнение (4) часто записывают в виде:
\[\overline{F}=\frac{d\left(m\overline{v}\right)}{dt}=\frac{d\left(\overline{p}\right)}{dt},\]где импульс называют релятивистским импульсом; $m$ - релятивистская масса, равная:
\[m=\frac{m_0}{\sqrt{1-\frac{v^2}{c^2}}}\left(5\right).\]Следует иметь в виду, что сила и ускорение точки в релятивистском случае совпадают. Сила совпадает по направлению с изменением импульса.
Примеры задач с решением
Пример 1
Задание. Железнодорожный вагон нагружен песком. Начальная масса вагона с грузом составляет $m_n$ кг. Вагон движется прямолинейно из состояния покоя под действием силы тяги равной $\overline{F}$. Эта сила направлена горизонтально и она постоянна (рис.1). В дне вагона имеется отверстие, через него высыпается песок с постоянной скоростью $\sigma \ \frac{кг}{с}$. Запишите функцию скорости в зависимости от времени ($v(t)$). Силой трения пренебречь.
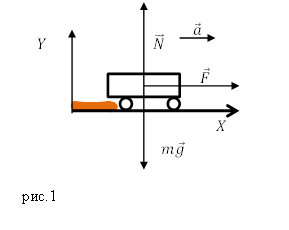
Решение. Запишем второй закон Ньютона для сил, действующих на вагон:
\[m\overline{g}+\overline{N}+\overline{F}=m\overline{a}\left(1.1\right).\]Запишем проекцию уравнения (1.1) на ось X:
\[F=ma\ \left(1.2\right),\]где $m=m_n-\sigma t$. Выразим ускорение из (1.2):
\[a=\frac{F}{m_n-\sigma t}\left(1.3\right).\]Учитывая кинематическое уравнение вида:
\[a=\frac{dv}{dt}\left(1.4\right)\]скорость найдем как:
\[v\left(t\right)=\int{a\left(t\right)dt=\int{\frac{F}{m_n-\sigma t}dt=\frac{F}{\sigma }}}{\ln \left(\frac{m_n}{m_n-\sigma t}\right)\ }+C\left(1.5\right).\]Из начального условия ($v\left(0\right)=0$) найдем постоянную интегрирования $C$:
\[v\left(0\right)=\frac{F}{\sigma }{ln \left(\frac{m_n}{m_n-\sigma \cdot 0}\right)\ }+C=0\to C=0.\]Получаем:
\[v\left(t\right)=\frac{F}{\sigma }{ln \left(\frac{m_n}{m_n-\sigma t}\right)\ }.\]Ответ. $v\left(t\right)=\frac{F}{\sigma }{ln \left(\frac{m_n}{m_n-\sigma t}\right)\ }$
Пример 2
Задание. Закон движения тела в плоскости задан уравнениями:
\[\left\{ \begin{array}{c} x=A{\sin \omega t;\ } \\ y=B{\cos \omega t.\ } \end{array} \right.\]где $A$, $B$, $\omega $ - постоянные величины. Каков модуль силы, действующий на тело?
Решение. Основой для решения задачи служит второй закон Ньютона:
\[\overline{F}=m\overline{a}\left(2.1\right).\]Используем для решения также кинематические уравнения для ускорения:
\[a_x=\frac{d^2x}{dt^2}\ и\ a_y=\frac{d^2y}{dt^2}\left(2.2\right).\]Подставляя уравнения движения точки из условий задачи в (2.2), получим проекции ускорения:
\[a_x=\frac{d}{dt}\left(\frac{d}{dt}\left(A{sin \omega t\ }\right)\right)=\frac{d}{dt}\left(A\omega {\cos \omega t\ }\right)=-A{\omega }^2{\sin \omega t\ };\] \[a_y=\frac{d}{dt}\left(\frac{d}{dt}\left(B{cos \omega t\ }\right)\right)=\frac{d}{dt}\left(-B{\sin \omega t\ }\right)=-B{\omega }^2{\cos \omega t.\ }\]Модуль ускорения найдем как:
\[a=\sqrt{a^2_x+a^2_y}=\sqrt{{(A{\omega }^2{sin \omega t\ })}^2+{(B{\omega }^2{cos \omega t\ })}^2}={\omega }^2\sqrt{x^2+y^2}\left(2.3\right).\]Из (2.1) и (2.3) получим модуль силы:
\[F=m{\omega }^2\sqrt{x^2+y^2}.\]Ответ. $F=m{\omega }^2\sqrt{x^2+y^2}$
Читать дальше: закон сохранения импульса.
Warning: file_put_contents(./students_count.txt): failed to open stream: Permission denied in /var/www/webmath-q2ws/data/www/webmath.ru/poleznoe/guide_content_banner.php on line 20

Статьи по теме
Поможем выполнить
любую работу







