Мгновенная скорость (обычно просто скорость) - это векторная величина, равная первой производной от радиус-вектора ($\overline{r}$), определяющего положение движущейся материальной точки, по времени ($t$):
\[\overline{v}=\frac{d\overline{r}}{dt}=\dot{\overline{r}}\left(1\right).\]Формула линейной скорости
Скорость движения тела ($\overline{v}$) называют линейной, если хотят подчеркнуть ее отличие от угловой скорости ($\omega $). Чаще величину $\overline{v}$, являющуюся векторной величиной, основной характеристикой движения тела, называют просто скоростью.
Формула мгновенной скорости
Определение
Представим вектор $\overline{r}$ в декартовой системе координат в виде:
\[\overline{r}=x\left(t\right)\overline{i}+y\left(t\right)\overline{j}+z\left(t\right)\overline{k}\left(2\right),\]где $\overline{i}$; $\overline{j}$; $\overline{k}$ - единичные орты соответствующих осей координат, постоянные во времени, при этом формулой скорости можно считать выражение:
\[\overline{v}=\overline{i}\frac{dx}{dt}+\overline{j}\frac{dy}{dt}+\overline{k}\frac{dz}{dt}\left(3\right).\]Проекциями вектора скорости на оси координат X, Y,Z являются:
\[\left\{ \begin{array}{c} v_x=\frac{dx}{dt}, \\ v_y=\frac{dy}{dt} \\ v_z=\frac{dz}{dt}. \end{array} \right.(4),\]Величину (модуль) скорости найдем в соответствии с формулой:
\[v=\sqrt{v^2_x+v^2_y{+v}^2_z}.\]Если движение задается при помощи параметров траектории, что означает: известны траектория и функция пути от времени ($s(t)$); путь отсчитывают от точки траектории, которую считают начальной; каждая точка траектории характеризуется своей величиной $s$; радиус - вектор является функцией от $s,$ и траекторию можно задать при помощи уравнения:
\[\overline{r}=\overline{r}\left(s\right)\left(5\right),\]в таком случае в формуле (1) $\overline{r}\left(t\right)$ будем рассматривать как сложную функцию: $\overline{r}\left[s\left(t\right)\right]$, формулой скорости станет:
\[\overline{v}=\frac{d\overline{r}}{dt}=\frac{d\overline{r}}{ds}\frac{ds}{dt}\left(6\right).\]Величина $\Delta s$ - это расстояние между двумя точками по траектории движения тела. Модуль $\left|\Delta \overline{r}\right|$ - расстояние между этими точками по кратчайшему направлению - прямой. При сближении рассматриваемых двух точек разница между $\Delta s$ и $\left|\Delta \overline{r}\right|$ уменьшается. Имеем:
\[\frac{d\overline{r}}{ds}={\mathop{\lim }_{\Delta s\to 0} \frac{\Delta \overline{r}}{\Delta s}\ }={\mathop{\lim }_{\Delta s\to 0} \frac{\Delta \overline{r}}{\left|\Delta \overline{r}\right|}\ }\cdot \frac{\left|\Delta \overline{r}\right|}{\Delta s}=\overline{\tau \ }\left(7\right),\]где $\overline{\tau \ }$ - единичный вектор, касательный к траектории движения материальной точки. Кроме этого:
\[\frac{ds}{dt}=v(8)\]модуль скорости движения точки по траектории. Уравнение (6) представим как:
\[\overline{v}=\frac{d\overline{r}}{dt}=\frac{ds}{dt}\overline{\tau \ }=v\overline{\tau \ }\left(9\right).\]Формула (9) показывает, что мгновенная скорость направлена по касательной к траектории движения тела (материальной точки).
Формулы средней скорости
Вектор средней скорости ($\left\langle \overline{v}\right\rangle $) при движении между двумя точками определяют как:
\[\left\langle \overline{v}\right\rangle \left(t,t+\Delta t\right)=\frac{\Delta \overline{r}}{\left|\Delta \overline{r}\right|}\frac{\left|\Delta \overline{r}\right|}{\Delta t}=\frac{\Delta \overline{r}}{\Delta t}\left(10\right),\]где в скобках у вектора средней скорости указан промежуток времени, для которого найдена средняя скорость; $\Delta \overline{r}$ - вектор перемещения точки; $\Delta t$- время движения.
При неравномерном движении средняя скорость для разных промежутков времени не одинакова. Устремляя $\Delta t$ к нулю, мы получим, что средняя скорость стремится к величине мгновенной скорости.
Иногда при вычислении средней скорости (ее называют средне путевой) применяют другую формулу:
\[\left\langle v\right\rangle =\frac{s}{t}\left(11\right),\]где $s$- весь путь пройденный точкой; $t$ - все время ее движения. В этом случае средняя скорость - это скаляр.
Формулы линейной скорости при движении разных видов
Если тело движется равномерно, скорость постоянная величина. Ее формулой считают:
\[v=\frac{s}{t}\left(12\right),\]где $s$ - путь; $t$ - время движения. При равномерном прямолинейном движении у скорости постоянным является не только величина, но и направление, при этом записывают:
\[\overline{v}=const.\]Если известно ускорение материальной точки как функции от времени ($\overline{a}(t)$) и начальная скорость движения тела (${\overline{v}}_0(t=0)$), скорость находят, используя формулу:
\[\overline{v}={\overline{v}}_0+\int\limits^{t'}_0{\overline{a}(t)}dt\ \left(13\right).\]Если тело перемещается с постоянным ускорением (при $\overline{a}=const$) скорость равна:
\[\overline{v}={\overline{v}}_0+\overline{a}t\ \left(14\right).\]Угловая и линейная скорости
При движении по кривой вместе со скоростью движения по траектории ($v$- линейная скорость) вводят угловую скорость ($\omega $), которая характеризует быстроту изменения угла поворота $\varphi $:
\[\omega =\frac{d\varphi }{dt}\left(15\right).\]Связь между линейной и угловой скоростями определена формулой:
\[v=R\omega \left(16\right),\]где $R$ - радиус кривизны траектории, по которой движется точка.
Примеры задач с решением
Пример 1
Задание. Положение материальной точки, задано радиус-вектором $\overline{r\ }\left(t\right),$ который является функцией времени: $\overline{r\ }\left(t\right)={2t}^4\overline{i}+t^2\overline{j},$ где $\overline{i}$ и $\overline{j}$ - единичные векторы осей X и Y (рис.1). Чему равен модуль скорости точки в момент времени $t=1$c?
Решение. В качестве основы для решения задачи воспользуемся формулой скорости:
\[\overline{v}={\frac{d\overline{r}}{dt} \left(1.1\right).\ }\]Подставим в выражение (1.1) $\overline{r\ }\left(t\right)=t^4\overline{i}+3t^2\overline{j},$ получим:
\[\overline{v}=\frac{d}{dt}\left({2t}^4\overline{i}+t^2\overline{j}\right)=8t^3\overline{i}+2t\overline{j}\ \left(1.2\right).\]Из уравнения (1.2) имеем:
\[\left\{ \begin{array}{c} v_x=8t^3 \\ v_y=2t \end{array} \right.\left(1.3\right).\]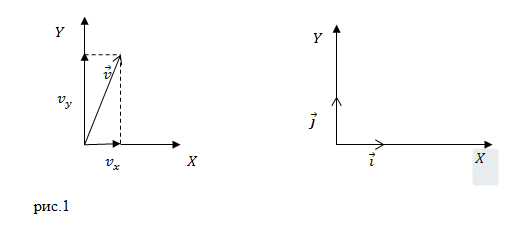
Используя теорему Пифагора, величину скорости вычислим как:
\[v=\sqrt{v^2_x+v^2_y}=\sqrt{{\left(8t^3\right)}^2+{\left(2t\right)}^2}=\sqrt{64t^6+{4t}^2}=\sqrt{68}(\frac{м}{с}).\]Ответ. $v=\sqrt{68}\frac{м}{с}$
Пример 2
Задание. С какой скоростью должен лететь самолет с востока на запад на широте $\varphi $, чтобы за окном иллюминатора всегда было светло? Радиус Земли считать равным R.
Решение. Сделаем рисунок.
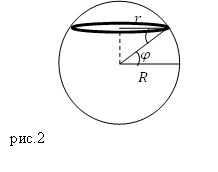
Самолет летит по окружности (рис.2), радиус которой найдем как:
\[r=R{\cos \varphi \ }\left(2.1\right).\]Для того чтобы не наступала ночь, тело должно двигаться с угловой скоростью, которая равна скорости вращения Земли вокруг своей оси ($\omega $). Для вычисления скорости движения самолета воспользуемся формулой:
\[v=\omega r=\omega R{\cos \varphi \ \left(2.2\right).\ }\]Угловую скорость вращения Земли найдем, зная, что период вращения Земли составляет 24 ч ($T=24\ ч$), следовательно, величину угловой скорости вращения Земли можно считать известной и равной:
\[\omega =\frac{2\pi }{T}\left(2.3\right).\]Окончательно получим, скорость движения самолёта равна:
\[v=\frac{2\pi }{T}R{\cos \varphi \ .\ }\]Ответ. $v=\frac{2\pi }{T}R{\cos \varphi \ }$
Читать дальше: формула модуля равнодействующей силы.
Warning: file_put_contents(./students_count.txt): failed to open stream: Permission denied in /var/www/webmath-q2ws/data/www/webmath.ru/poleznoe/guide_content_banner.php on line 20

Статьи по теме
Поможем выполнить
любую работу







