Ускорением ($\overline{a}$) называют векторную физическую величину, которая характеризует быстроту изменения скорости движения тела:
\[\overline{a}={\mathop{\lim }_{\Delta t\to 0} \frac{\Delta \overline{v}}{\Delta t}\ }=\frac{d\overline{v}}{dt}=\dot{\overline{v}}\left(1\right).\]Сложение ускорений
Определение
Сложное движение материальной точки
Рассмотрим случай, когда материальная точка движется относительно системы координат XYZ, а сама система координат XYZ перемещается относительно системы координат $X_1Y_1Z_1$, являющейся неподвижной (рис.1).
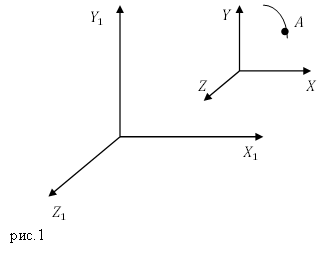
Движение точки А, рассматриваемое одновременно относительно двух систем координат, подвижной и неподвижной называют сложным движением.
При этом перемещение точки относительно неподвижной системы координат называют абсолютным движением. Скорость и ускорение движения точки относительно неподвижных осей называют абсолютной скоростью ($\overline{v}$) и абсолютным ускорением ($\overline{a}$).
Перемещение материальной точки по отношению к движущейся системе координат называют относительным. Скорость и ускорение точки относительно подвижной системы координат называют относительными. Обозначим их ${\overline{v}}_r$ и ${\overline{a}}_r$.
Перемещение подвижной системы координат вместе со связанными с ней геометрическими точками относительно неподвижной системы называют переносным движением. При этом переносной скоростью (${\overline{v}}_e$) и переносным ускорением (${\overline{a}}_e$) точки $A$ называют скорость и ускорение по отношению к неподвижной системе координат точки $A_1$, которая связана с подвижными осями, с которой в данный момент времени совпадает перемещающаяся точка $A$. Точка $A$ в процессе своего движения оказывается в разных местах системы координат XYZ. Точка $A_1$ движется вместе с системой координат XYZ относительно неподвижной системы $X_1Y_1Z_1$, со скоростью ${\overline{v}}_{A_1}\ и\ $ускорением${\ \overline{a}}_{A_1}$. Эти величины и есть переносные скорость и ускорение:
\[{\overline{v}}_e={\overline{v}}_{A_1};;\ {\overline{a}}_e={\ \overline{a}}_{A_1}=\frac{d{\overline{v}}_{A_1}}{dt}\left(1\right).\]В практических задачах роль систем координат выполняют подвижные и неподвижные тела. Переносное движение сводится к одному из видов движения: поступательному, вращательному и т.д.
Скорости и ускорения связаны теоремами сложения скоростей и ускорений.
Теорема сложения ускорений
Относительное ускорение определяет быстроту изменения относительной скорости в отношении подвижной системы координат. Значит, его можно выразить при помощи локальной производной по времени от ${\overline{v}}_r$ точки:
\[{\overline{a}}_r=\frac{d\ {\overline{v}}_r}{dt}=\frac{d^2x}{dt^2}\overline{i}+\frac{d^2y}{dt^2}\overline{j}+\ \frac{d^2z}{dt^2}\overline{k}\left(2\right),\]где $\overline{i}$, $\overline{j}$, $\overline{k}$ - постоянные единичные орты.
Переносное ускорение в соответствии с (1) равно:
\[{\overline{a}}_e={\ \overline{a}}_{A_1}=\frac{d}{dt}\left[\frac{d{\overline{r}}_O}{dt}+x\frac{d\overline{i}}{dt}+y\frac{d\overline{j}}{dt}+z\frac{d\overline{k}}{dt}\right]=\frac{d^2{\overline{r}}_O}{dt^2}+x\frac{d^2\overline{i}}{dt^2}+y\frac{d^2\overline{j}}{dt^2}+z\frac{d^2\overline{k}}{dt^2}\left(3\right),\]где $x=const,\ y=const,\ z=const.$
Абсолютное ускорение точки определяет скорость изменения соответствующей скорости относительно неподвижных осей:
\[\overline{a}=\frac{d\overline{v}}{dt}=\frac{d}{dt}\left({\overline{v}}_e+{\overline{v}}_r\right)=\frac{d{\overline{v}}_e}{dt}+\frac{d{\overline{v}}_r}{dt}\left(4\right).\]Производные находят относительно неподвижных осей, следовательно, при дифференцировании скоростей в (4) переменными будут и координаты и орты.
\[\overline{a}={\overline{a}}_e+{\overline{a}}_r+2\left(\frac{dx}{dt}\cdot \frac{d\overline{i}}{dt}+\frac{dy}{dt}\cdot \frac{d\overline{j}}{dt}+\frac{dz}{dt}\cdot \frac{d\overline{k}}{dt}\right)\left(5\right).\]Слагаемое $2\left(\frac{dx}{dt}\cdot \frac{d\overline{i}}{dt}+\frac{dy}{dt}\cdot \frac{d\overline{j}}{dt}+\frac{dz}{dt}\cdot \frac{d\overline{k}}{dt}\right)$ называют ускорением Кориолиса (${\overline{a}}_k$):
\[{\overline{a}}_k=2\left(\frac{dx}{dt}\cdot \frac{d\overline{i}}{dt}+\frac{dy}{dt}\cdot \frac{d\overline{j}}{dt}+\frac{dz}{dt}\cdot \frac{d\overline{k}}{dt}\right)=2\left[{\overline{\omega }}_e{\overline{v}}_r\right]\left(6\right),\]где ${\overline{\omega }}_e$ - вектор переносной угловой скорости; ${\overline{v}}_r$ - вектор относительной линейной скорости; в правой части формулы (6) стоит векторное произведение.
И так, теорему сложения ускорений записывают в виде системы векторных уравнений:
\[\left\{ \begin{array}{c} \overline{a}={\overline{a}}_e+{\overline{a}}_r+{\overline{a}}_k \\ {\overline{a}}_k=2\left[{\overline{\omega }}_e{\overline{v}}_r\right] \end{array} \right.\left(7\right).\]Для того чтобы определить величину и направление ускорения Кориолиса находят величину и направление ${\overline{v}}_r$. Далее строят вектор ${\overline{\omega }}_e$ и переносится в точку $A$. После этого используют правила векторной алгебры для вычисления векторного произведения. Ускорение Кориолиса направлено перпендикулярно плоскости, в которой находятся ${\overline{v}}_r$ и ${\overline{\omega }}_e$ в сторону, из которой кратчайший поворот от ${\overline{\omega }}_e$ к ${\overline{v}}_r,$ виден происходящим против часовой стрелки.
Примеры задач на сложение ускорений
Пример 1
Задание. При каких условиях ускорение Кориолиса равно нулю? Как в случае переносного поступательного движения записывается теорема сложения ускорений?
Решение. Для определения условий равенства нулю ускорения Кориолиса рассмотрим его определение:
\[{\overline{a}}_k=2\left[{\overline{\omega }}_e{\overline{v}}_r\right]\left(1.1\right).\]Модуль $\left|{\overline{a}}_k\right|$ равен:
\[\left|{\overline{a}}_k\right|=2\left|{\overline{\omega }}_e\right|\left|{\overline{v}}_r\right|{\sin \alpha \ \left(1.2\right),\ }\]где $\alpha $ - угол между векторами ${\overline{\omega }}_e$ и ${\overline{v}}_r$.
Из формулы (1.2) следует, что ${\overline{a}}_k$=0, когда:
- $\left|{\overline{v}}_r\right|=0$ или $\left|{\overline{\omega }}_e\right|$=0;
- $\alpha =0{}^\circ $ или $\alpha =180{}^\circ $, то есть ${\overline{v}}_r||{\overline{\omega }}_e$.
- переносное движение является поступательным. В таком случае движение подвижной системы отсчета не имеет вращательной компоненты, переносная угловая скорость в любой момент времени равна нулю: \[{\overline{\omega }}_e\equiv 0\left(1.3\right),\]
тогда в любой момент времени равно нулю ускорение Кориолиса. Теорема сложения ускорений принимает вид:
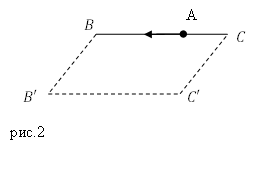
\[\overline{a}={\overline{a}}_e+{\overline{a}}_r\left(1.4\right).\]Так можно найти абсолютное ускорение в случае, который изображен на рис.2, при сложном движении точки A. Переносным движением является движение стержня BC, которое при выполнении условия:
\[BB'=CC'\]является поступательным.
Пример 2
Задание. Каким будет абсолютное ускорение тела, если оно движется вниз по наклонной плоскости с постоянным относительным ускорением $a_r$? Наклонная плоскость, составляющая угол $\alpha $ с горизонтом, перемещается прямолинейно параллельно оси X с постоянным ускорением $a_e$.
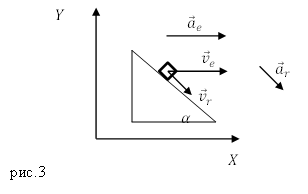
Решение. Так как движение наклонной плоскости является поступательным, то теорему о сложении ускорений запишем в виде:
\[\overline{a}={\overline{a}}_e+{\overline{a}}_r\left(2.1\right).\]В проекции на оси неподвижной системы XOY, получим:
\[\left\{ \begin{array}{c} X:\ a_x=a_e+a_r{\cos \alpha \ } \\ Y:\ a_y=-a_r{\sin \alpha \ } \end{array} \right.\left(2.2\right).\]По теореме Пифагора найдем величину абсолютного ускорения:
\[a=\sqrt{a^2_x+a^2_y}=\sqrt{{(a_e+a_r{cos \alpha \ })}^2+{a_r}^2{{\sin }^2 \alpha \ }}=a^2_e+2a_ea_r{\cos \alpha +\ }{a_r}^2.\]Ответ. $a=a^2_e+2a_ea_r{\cos \alpha +\ }{a_r}^2$
Читать дальше: спираль Корню.
Warning: file_put_contents(./students_count.txt): failed to open stream: Permission denied in /var/www/webmath-q2ws/data/www/webmath.ru/poleznoe/guide_content_banner.php on line 20

Статьи по теме
Поможем выполнить
любую работу







